Лекция 4. КИНЕМАТИКА И ДИНАМИКА ПОРШНЕВЫХ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ 1. Кинематика и динамика кривошипно-шатунного механизма 2. Уравновешивание двигателя Кривошипно-шатунный механизм (КШМ) является наиболее распространенной конструктивной реализацией важного функционального элемента теплового двигателя конечного преобразователя. Чувствительный элемент этого преобразователя поршень 2 (см. рис. 1), днище которого воспринимает давление газов. Возвратно-поступательное и прямолинейное движение поршня (под действием давления газов) преобразуется во вращательное движение выходного коленчатого вала с помощью шатуна 4 и кривошипа 5.
К подвижным частям КШМ относят также маховик, установленный на заднем конце коленчатого вала. Механическая энергия вращающегося коленчатого вала характеризуется вращающим моментом Ми частотой вращения п. К неподвижным частям КШМ относится блок цилиндров 3, головка блока 1 и поддон 6. Рис. 1. Схема поршневого двигателя внутреннего сгорания: 1 головка блока; 2 поршень; 3 блок цилиндров; 4 шатун; 5 кривошип коленвала; б поддон (масляный картер)

Условия работы деталей КШМ современных двигателей, связанные с воздействием газовых сил на поршень, характеризуются значительными и быстропеременными скоростями и ускорениями. Шатун и коленчатый вал воспринимают и передают значительные по величине нагрузки. Анализ всех сил, действующих в КШМ двигателя, необходим для расчета элементов двигателя на прочность, определения нагрузок на подшипники, оценки уравновешенности двигателя, расчета опор двигателя. Величина и характер изменения механических нагрузок, приходящихся на эти детали, определяется на основе кинематического и динамического исследования КШМ. Динамическому расчету предшествует тепловой расчет, обеспечивающий возможность выбора основных размеров двигателя (диаметр цилиндра, ход поршня) и нахождения величины и характера изменения сил под воздействием давления газов.

Абв Рис. 2. Основные конструктивные схемы кривошипно-шатунных механизмов автомобильных двигателей: а центральная; б смещенная; в V-образная 1. Кинематика и динамика кривошипно-шатунного механизма В автомобильных поршневых двигателях применяются в основном КШМ трех конструктивных схем (рис. 2): а)центральный, или аксиальный, ось цилиндра пересекается с осью коленчатого вала; б)смещенный, или дезаксиальный, ось цилиндра смещена на некоторое расстояние относительно оси коленчатого вала; в)с прицепным шатуном два или более шатунов размещены на одной кривошипной шейке коленчатого вала.

Наибольшее распространение в автомобильных двигателях получил центральный КШМ. Проанализируем кинематику и динамику его работы. Задачей кинематического анализа КШМ является установление законов движения поршня и шатуна при известном законе движения кривошипа коленвала. При выводе основных закономерностей пренебрегают неравномерностью вращения коленчатого вала, считая, что его угловая скорость со постоянна. За исходное принимают положение поршня, соответствующее ВМТ. Все величины, характеризующие кинематику механизма, выражают в функции угла поворота коленчатого вала. Путь поршня. Из схемы (см. рис. 2, а) следует, что перемещение поршня от ВМТ, соответствующее повороту коленчатого вала на угол φ, равно Sn = ОА1 -ОА = R(l - cos φ) + Lш (I - cosβ) (1) где R радиус кривошипа коленвала, м; L ш длина шатуна, м. Из тригонометрии известно, что cosβ = (l - sin2 φ) 2, а из рис. 2, а следует, что (2)

Обозначив Выражение представляет собой бином Ньютона, который можно разложить в ряд, можно записать Для автомобильных двигателей λ = 0,24...0,31. (3) Пренебрегая членами ряда выше второго порядка, принимаем с достаточной для практики точностью Подставляя полученное значение cosβ в выражение (1) и учитывая, что получим окончательное выражение, описывающее перемещение поршня

(4) Скорость поршня. Формулу для определения скорости поршня v n получают, дифференцируя выражение (4) по времени, (5) где угловая скорость коленчатого вала. Для сравнительной оценки конструкции двигателей вводят понятие средней скорости поршня (м/с): где п частота вращения коленвала, об./мин. Для современных автомобильных двигателей величина vп.ср колеблется в пределах м/с. Чем выше средняя скорость поршня, тем быстрее изнашиваются направляющие поверхности цилиндра и поршня.

Ускорение поршня. Выражение для ускорения поршня j п получают, дифференцируя выражение (5) по времени (6) На рис. 2 показаны кривые изменения пути, скорости и ускорения поршня в зависимости от угла поворота коленчатого вала φ, построенные по формулам (4)...(6) для одного полного поворота коленчатого вала. Анализ кривых позволяет отметить следующее: при повороте кривошипа из исходного положения на первую четверть оборота (от φ = 0 до φ = 90°) поршень проходит на Rλ больший путь, чем при повороте на вторую четверть оборота, что вызывает большую среднюю скорость поршня в первой четверти и большие износы верхней части цилиндра; скорость поршня не постоянна: она равна нулю в мертвых точках и имеет максимальное значение при φ, близком к 75° и 275°; ускорение поршня достигает наибольших абсолютных значений в ВМТ и НМТ, т.е. в те моменты, когда изменяется направление движения поршня: при этом ускорение в ВМТ больше, чем в НМТ; при v nmax = 0 (ускорение меняет свой знак).


Задачей динамического анализа КШМ является получение расчетных формул для определения величины и характера изменения сил, действующих на поршень, шатун и кривошип коленвала, и моментов сил, возникающих в КШМ при работе двигателя. Знание сил, действующих на детали КШМ, необходимо для расчета элементов двигателя на прочность и определение нагрузок на подшипники. При работе двигателя на детали КШМ действуют силы от давления газов в цилиндре и силы инерции движущихся масс механизма, а также силы трения и силы полезного сопротивления на валу двигателя. Сила давления газов Р г, действующая на поршень по оси цилиндра, вычисляется по формуле (7) где Рi индикаторное давление газов (давление над поршнем) при заданном угле поворота кривошипа, МПа; р 0 давление в картере двигателя (под поршнем), МПа; А п площадь днища поршня, м 2.

Кривые зависимости силы давления РГ от угла поворота кривошипа φ показаны на рис. 3. При построении графика считают, что сила положительная, если она направлена к коленчатому валу, и отрицательная, если направлена от вала. Рис. 3. Изменение сил давления газов, инерции и суммарной силы в зависимости от угла поворота коленчатого вала

Силы инерции в зависимости от характера движения подвижных частей КШМ делят на силы инерции возвратно-поступательно движущихся масс Р j и силы инерции вращающихся масс Р а. Массу т ш шатуна, участвующего одновременно в возвратно-поступательном и вращательном движениях, заменяют двумя массами т 1, и т 2, сосредоточенными в центах А и В соответственно поршневой и кривошипной головок (рис. 4, б). При приближенных расчетах принимают т х = 0,275 т ш и т 2 = 0,725 т ш. Сила инерции возвратно-поступательно движущихся масс (поршня с кольцами и пальцем т п, а также массы т ш, шатуна) действует по оси цилиндра и равна (8) Характер изменения этой силы аналогичен характеру изменения ускорения поршня j n. Знак «минус» показывает, что направления силы и ускорения различны. График зависимости Р j от угла поворота кривошипа ср приведен на рис. 3. Сила инерции вращающихся масс, являющаяся центробежной силой, направлена по радиусу кривошипа от его оси вращения и равна (9)

Где т к неуравновешенная масса кривошипа, которую считают сосредоточенной на оси кривошипа в точке В (рис. 4, б); m ш.ш.- масса шатунной шейки с прилегающими и расположенными концентрично ей частями щек; т щ масса средней части щеки, заключенной в контуре a-b-c-d-a, центр тяжести которой расположен на расстоянии р от оси вращения вала (рис. 4, а). Рис. 4. Система сосредоточенных масс, динамически эквивалентная кривошипно-шатунному механизму: а схема приведения масс кривошипа; б приведенная схема кривошипно-шатунного механизма

Суммарная сила. Сила давления газов Р г и сила инерции возвратно- поступательно движущихся масс P j действуют совместно вдоль оси цилиндра. Для исследования динамики КШМ имеет значение сумма этих сил (Р = Р т + P j). Силу Р для различных углов поворота кривошипа получают алгебраическим сложением ординат точек кривых Р т и P j (см. рис. 3). Чтобы исследовать действие суммарной силы Р на детали КШМ, разложим ее на две составляющие силы: Р ш, направленную по оси шатуна, и N, действующую перпендикулярно оси цилиндра (рис. 5, а): Перенесем силу Р ш вдоль линии ее действия в центр шатунной шейки кривошипа (точка В) и заменим двумя составляющими силами тангенциальной (7) и радиальной (К): (10) (11)


К центру О кривошипа приложим две взаимно противоположные силы Т" и Т", равные и параллельные силе Т. Силы Т и Т" составляют пару с плечом, равным радиусу R кривошипа. Момент этой пары сил, вращающий кривошип, называется вращающим моментом двигателя М Д = TR. Радиальную силу перенесем в центр О и найдем результирующую Р ш сил К и Т" (рис. 5, б). Сила Р ш равна и параллельна силе Р ш. Разложение силы Р ш в направлениях по оси цилиндра и перпендикулярно ей дает две составляющие силы Р" и N". Сила Р" по величине равна силе Р, слагающейся из сил Р т и Р,. Первая из двух слагаемых сил уравновешивается силой давления газов на головку цилиндров, вторая передается на опоры двигателя. Эту неуравновешенную силу инерции возвратно-поступательно движущихся частей P j обычно представляют в виде суммы двух сил (12) которые получили название сил инерции первого (PjI) и второго (PjII) порядка. Эти силы действуют по оси цилиндра.

Силы N" и N (рис. 5, в) составляют пару сил с моментом М опр =-NH, стремящимися опрокинуть двигатель. Опрокидывающий момент, его также называют реактивным моментом двигателя, всегда равен вращающему моменту двигателя, но имеет противоположное направление. Этот момент через внешние опоры двигателя передается раме автомобиля. Используя формулу (10), а также зависимость М Д =TR, можно построить график индикаторного вращающего момента М д одноцилиндрового двигателя в зависимости от угла φ (рис. 6, а). На этом графике площади, расположенные над осью абсцисс, представляют собой положительную, а расположенные под осью абсцисс отрицательную работу вращающего момента. Разделив алгебраическую сумму этих площадей А на длину графика l, получим среднее значение момента где М м масштаб момента

Для оценки степени равномерности индикаторного вращающего момента двигателя введем коэффициент неравномерности вращающего момента где M max ; M min ; M ср соответственно максимальный, минимальный и средний индикаторные моменты. С увеличением числа цилиндров двигателя уменьшается коэффициент μ, т.е. увеличивается равномерность вращающего момента (рис. 6). Неравномерность вращающего момента вызывает изменения угловой скорости со коленчатого вала, что оценивается коэффициентом неравномерности хода: где:ω max ; ω min ; ω ср соответственно наибольшая, наименьшая и средняя угловые скорости коленчатого вала за цикл,


Заданную неравномерность хода δ обеспечивают применением маховика с моментом инерции J, используя соотношения: где А изб площадь, лежащая над линией М ср (рис. 6, б) и пропорциональная избыточной работе Wизб вращающего момента; - масштаб угла поворота коленчатого вала, 1 рад/мм i aб -(i число цилиндров, отрезок аб в мм); n частота вращения, об./мин. Избыточную работу определяют графически, величины δ и J задаются при проектировании. Для автомобильных двигателей δ = 0,01...0,02.

2. Уравновешивание двигателя Двигатель считается уравновешенным, если при установившемся режиме работы силы и моменты, действующие на его опоры, постоянны по величине и направлению или равны нулю. У неуравновешенного двигателя передаваемые на подвеску переменные по величине и направлению силы вызывают колебания подмоторной рамы, кузова. Эти колебания часто являются причиной дополнительных поломок элементов автомобиля. При практическом решении задач уравновешивания двигателей обычно учитывают следующие силы и моменты, действующие на опоры поршневого двигателя: а) силы инерции возвратно-поступательно движущихся масс КШМ первого P jI и второго P jII порядка; б) центробежную силу инерции вращающихся неуравновешенных масс КШМ Р ц; в) продольные моменты М jI и М jII сил инерции P jI и P jII ; г) продольный центробежный момент М ц центробежной силы инерции Р ц.

Условия уравновешенности двигателя описываются следующей системой уравнений: (13) Уравновешивание осуществляется двумя способами, применяемыми отдельно или одновременно: 1. выбором такой кривошипной схемы коленчатого вала, при которой указанные силы и моменты, возникающие в разных цилиндрах, взаимно уравновешиваются; 2. применением противовесов, т.е. дополнительных масс, сила инерции которых равна по величине и противоположна по направлению уравновешиваемым силам. Рассмотрим уравновешивание одноцилиндрового двигателя, в котором неуравновешенными являются силы инерции Р jI, P jII, Р ц. Силы инерции первого P jI и второго Р jII порядка можно полностью уравновесить с помощью системы добавочных противовесов.

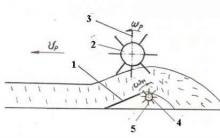
Сила P jI =m j Rω 2 cos φ уравновешивается при установке двух противовесов массой т пр 1 на двух параллельных оси коленчатого вала и симметрично расположенных относительно оси цилиндра дополнительных валах, вращающихся в противоположные стороны с угловой скоростью коленчатого вала ω. Противовесы устанавливаются так, чтобы в любой момент направление их подвеса составляло с вертикалью угол, равный углу поворота коленчатого вала φ (рис. 7). При вращении каждый противовес создает центробежную силу где p j расстояние от оси вращения противовеса до его центра тяжести. Раскладывая векторы двух сил на горизонтальные Y I и вертикальные Х I составляющие, убеждаемся, что при любом φ силы Y I взаимно уравновешиваются, а силы Х I дают равнодействующую Сила R} может полностью уравновесить силу Р л при соблюдении условия

Откуда Аналогично уравновешивается сила Р и, только противовесы в этом случае вращаются с удвоенной угловой скорость 2ω (рис. 7). Центробежную силу инерции Р ц можно полностью уравновесить с помощью противовесов, которые устанавливают на щеках коленчатого вала со стороны, противоположной кривошипу. Масса каждого противовеса т пр выбирается с соблюдением условия откуда где р расстояние от центра тяжести противовеса до оси вращения.


Схема сил инерции, действующих в 4-цилиндровом однорядном двигателе, показана на рис. 8. Из нее видно, что при данной форме коленчатого вала силы инерции первого порядка уравновешиваются Σ РjI = 0. В продольной плоскости двигателя силы образуют две пары, момент P jI которых M jI = P jI а. Так как направления этих моментов противоположны, то и они тоже уравновешиваются (Σ M jI = 0). Рис. 8. Схема сил инерции, действующих в 4- цилиндровом однорядном двигателе

Уравновешены также центробежные силы и их моменты и моменты сил инерции второго порядка, что означает В 4-цилиндровом двигателе остаются неуравновешенными силы Р jII. Уравновесить их можно с помощью вращающихся противовесов, как сказано выше, но это приведет к усложнению конструкции двигателя. В 6-цилиндровом рядном четырехтактном двигателе кривошипы коленвала расположены равномерно, через 120°. В этом двигателе полностью уравновешены как силы инерции, так и их моменты. Однорядный 8-цилиндровый четырехтактный двигатель можно рассматривать как два однорядных четырехцилиндровых двигателя, у которых коленчатые валы повернуты один относительно другого на 90°. В такой схеме двигателя также уравновешены все силы инерции и их моменты. Схема V-образного 6-цилиндрового четырехтактного двигателя с углом между рядами 90° (угол развала цилиндров) и тремя спаренными кривошипами под углом 120° показана на рис. 9.

В каждой 2-цилиндровой секции результирующая сил инерции первого порядка и результирующая сил инерции вращающихся масс левого и правого цилиндра постоянны по величине и направлены вдоль радиуса кривошипа. Результирующая сил инерции второго порядка в секции переменна по величине и действует в горизонтальной плоскости. На рис. 9 силы P jI, P jII, P ц - равнодействующие силы инерции для каждой секции спаренных цилиндров, штрихи в обозначении сил на рисунке указывают номер секции цилиндра. Для всего двигателя (для трех пар цилиндров) сумма сил инерции равна нулю, т.е Суммарные моменты сил инерции первого порядка и центробежных сил, равные соответственно и действуют в одной вращающейся плоскости, проходящей через ось коленчатого вала и составляющей с плоскостью первого кривошипа угол 30°. Для уравновешивания этих моментов устанавливают противовесы на двух крайних щеках коленчатого вала (см. рис. 9). Масса противовеса т пр определяется из условия

Где b расстояние между центрами тяжести противовесов. Суммарный момент сил инерции второго порядка действует в горизонтальной плоскости. Обычно ΣM jII не уравновешивают, так как это связано со значительным усложнением конструкции. Для приближения действительной уравновешенности к теоретической в производстве двигателей предусматривается ряд конструкторских и технологических мер: - коленчатый вал делают как можно более жестким; - возвратно-поступательно движущиеся детали при сборке подбирают комплектно с наименьшей разницей масс комплектов в разных цилиндрах одного двигателя; - допустимые отклонения на размеры деталей КШМ устанавливают как можно меньшие; - вращательно движущиеся детали тщательно балансируют, а коленчатые валы и маховики подвергают динамической балансировке.


Балансировка заключается в выявлении неуравновешенности вала относительно оси вращении и в самом уравновешивании с помощью удаления металла или с помощью прикрепления балансировочных грузов. Балансировка вращающихся деталей подразделяется на статическую и динамическую. Тело считается уравновешенным статически, если центр масс тела лежит на оси вращения. Статической балансировке подвергают вращающиеся детали дисковой формы, диаметр которых больше толщины. Деталь насаживают на цилиндрический вал, который укладывают на две параллельные горизонтальные призмы. Деталь самоустанавливается, повернувшись тяжелой частью вниз. Эта неуравновешенность устраняется прикреплением противовеса в точке, диаметрально противоположной нижней (тяжелой) части детали. На практике для статической балансировки используют приборы, позволяющие сразу определить массу балансирного груза и место его установки. Динамическая балансировка обеспечивается при соблюдении условия статической балансировки и выполнении второго условия сумма моментов центробежных сил вращающихся масс относительно любой точки оси вала должна равняться нулю. При выполнении этих двух условий ось вращения совпадает с одной из главных осей инерции тела.

Динамическая балансировка осуществляется при вращении вала на специальных балансировочных станках. ГОСТ устанавливает классы точности балансировки для жестких роторов, а также требования к балансировке и методы расчета дисбалансов. Так, например, узел коленчатого вала двигателя для легкового и грузового автомобилей оценивается 6-м классом точности, дисбаланс при этом должен быть в пределах мм · рад/с. Во время работы двигателя на каждый кривошип коленчатого вала действуют непрерывно и периодически изменяющиеся тангенциальные и нормальные силы, вызывающие в упругой системе узла коленвала переменные деформации кручения и изгиба. Относительные угловые колебания сосредоточенных на валу масс, вызывающие закручивание отдельных участков вала, называются крутильными колебаниями. При известных условиях знакопеременные напряжения, вызываемые крутильными и изгибными колебаниями, могут привести к усталостной поломке вала. Расчеты и экспериментальные исследования показывают, что для коленчатых валов изгибные колебания менее опасны, чем крутильные.

Поэтому в первом приближении при расчетах изгибными колебаниями можно пренебречь. Крутильные колебания коленчатого вала опасны не только для деталей КШМ, но и для приводов различных агрегатов двигателя и для агрегатов силовой передачи автомобиля. Обычно расчет на крутильные колебания сводится к определению напряжений в коленчатом валу при резонансе, т.е. при совпадении частоты возбуждающей силы с одной из частот собственных колебаний вала. Если возникает необходимость в уменьшении возникающих напряжений, то на коленчатом валу устанавливают гасители крутильных колебаний (демпферы). В автотракторных двигателях наибольшее распространение имеют гасители внутреннего (резиновые) и жидкостного трения. Они работают на принципе поглощения энергии колебаний с последующим рассеиванием ее в виде тепла. Резиновый гаситель состоит из инерционной массы, при вулканизированной через резиновую прокладку к диску. Диск жестко соединен с коленчатым валом. На резонансных режимах инерционная масса начинает колебаться, деформируя резиновую прокладку. Деформация последней способствует поглощению энергии колебаний и «расстраивает» резонансные колебания коленчатого вала.

В гасителях жидкостного трения свободная инерционная масса помещается внутри герметически закрытого корпуса, жестко связанного с коленвалом. Пространство между стенками корпуса и массой заполнено специальной силиконовой жидкостью большой вязкости. При нагревании вязкость этой жидкости меняется незначительно. Гасители крутильных колебаний следует устанавливать в том месте вала, где имеется наибольшая амплитуда колебаний.

Кинематика кривошипно-шатунного механизма
В автотракторных ДВС в основном используются два типа кривошипно-шатунного механизма (КШМ): центральный (аксиальный) и смещенный (дезаксиальный) (рис. 5.1). Смещенный механизм можно создать, если ось цилиндра не пересекает ось коленчатого вала ДВС или смещена относительно оси поршневого пальца. Многоцилиндровый ДВС формируется на основе указанных схем КШМ в виде линейной (рядной) или многорядной конструкции.
Рис. 5.1. Кинематические схемы КШМ автотракторного двигателя: а - центрального линейного; б - смещенного линейного
Законы движения деталей КШМ изучаются, используя его структуру, основные геометрические параметры его звеньев, без учета сил, вызывающих его движение, и сил трения, а также при отсутствии зазоров между сопряженными подвижными элементами и постоянной угловой скорости кривошипа.
Основными геометрическими параметрами, определяющими законы движения элементов центрального КШМ, являются (рис. 5.2, а): г- радиус кривошипа коленчатого вала; / ш - длина шатуна. Параметр А = г/1 ш является критерием кинематического подобия центрального механизма. В автотракторных ДВС используются механизмы с А = 0,24...0,31. В де- заксиальных КШМ (рис. 5.2, б) величина смешения оси цилиндра (пальца) относительно оси коленчатого вала (а) влияет на его кинематику. У автотракторных ДВС относительное смещение к = а/г = 0,02...0,1 - дополнительный критерий кинематического подобия.

Рис. 5.2. Расчетная схема КШМ: а - центрального; б - смещенного
Кинематика элементов КШМ описывается при движении поршня, начиная от ВМТ к НМТ, и вращении кривошипа по часовой стрелке законами изменения по времени (/) следующих параметров:
- ? перемещения поршня - х;
- ? угла поворота кривошипа - (р;
- ? угла отклонения шатуна от оси цилиндра - (3.
Анализ кинематики КШМ проводится при постоянстве угловой скорости кривошипа коленчатого вала со или частоты вращения коленчатого вала («), связанных между собой соотношением со = кп/ 30.
При работе ДВС подвижные элементы КШМ совершают следующие перемещения:
- ? вращательное движение кривошипа коленчатого вала относительно его оси определяется зависимостями угла поворота ср, угловой скорости со и ускорения е от времени t. При этом ср = со/, а при постоянстве со - е = 0;
- ? возвратно-поступательное движение поршня описывается зависимостями его перемещения х, скорости v и ускорения j от угла поворота кривошипа ср.
Перемещение поршня центрального КШМ при повороте кривошипа на угол ср определяется как сумма его смещений от поворота кривошипа на угол ср (Xj) и от отклонения шатуна на угол р (х п) (см. рис. 5.2):
Эту зависимость, используя соотношение X = г/1 ш, связь между углами ср и р (Asincp = sinp), можно представить приближенно в виде суммы гармоник, кратных частоте вращения коленчатого вала. Например, для X = 0,3 первые амплитуды гармоник соотносятся как 100:4,5:0,1:0,005. Тогда с достаточной для практики точностью описание перемещения поршня можно ограничить двумя первыми гармониками. Тогда при ср = со/
Скорость поршня
определяют как
 и приближенно
и приближенно
Ускорение поршня
вычисляют по формуле
 и приближенно
и приближенно
В современных ДВС v max = 10...28 м/с, y max = 5000...20 000 м/с 2 . С ростом скорости поршня повышаются потери на трение и износ двигателя.
Для смещенного КШМ приближенные зависимости имеют вид

Данные зависимости по сравнению с их аналогами для центрального КШМ отличаются дополнительным членом, пропорциональным кк. Так как для современных двигателей его величина составляет кк = 0,01...0,05, то его влияние на кинематику механизма невелико и на практике им обычно пренебрегают.
Кинематика сложного плоскопараллельного движения шатуна в плоскости его качания складывается из перемещения его верхней головки с кинематическими параметрами поршня и вращательного движения относительно точки сочленения шатуна с поршнем.
При изучении кинематики КШМ предполагают, что коленчатый вал двигателя вращается с постоянной угловой скоростью ω, отсутствуют зазоры в сопряженных деталях, и механизм рассматривают с одной степенью свободы.
В действительности из-за неравномерности крутящего момента двигателя угловая скорость переменна. Поэтому при рассмотрении специальных вопросов динамики, в частности крутильных колебаний системы коленчатого вала, необходимо учитывать изменение угловой скорости.
Независимой переменной принимают угол поворота кривошипа коленчатого вала φ. При кинематическом анализе устанавливают законы движения звеньев КШМ, и в первую очередь поршня и шатуна.
За исходное принимают положение поршня в верхней мертвой точке (точка В 1 ) (рис. 1.20), а направление вращения коленчатого вала по часовой стрелке. При этом для выявления законов движения и аналитических зависимостей устанавливают наиболее характерные точки. Для центрального механизма такими точками являются ось поршневого пальца (точка В), совершающая вместе с поршнем возвратно-поступательное движение вдоль оси цилиндра, и ось шатунной шейки кривошипа (точка А ), вращающаяся вокруг оси коленчатого вала О .
Для определения зависимостей кинематики КШМ введем следующие обозначения:
l – длина шатуна;
r – радиус кривошипа;
λ – отношение радиуса кривошипа к длине шатуна.
Для современных автомобильных и тракторных двигателей величина λ = 0.25–0.31. Для высокооборотных двигателей с целью уменьшения сил инерции возвратно-поступательно движущихся масс применяют более длинные шатуны, чем для малооборотных.
β – угол между осями шатуна и цилиндра, величина которого определяется по следующей зависимости:
Наибольшие углы β для современных автомобильных и тракторных двигателей составляют 12–18°.
Перемещение (путь) поршня будет зависеть от угла поворота коленчатого вала и определяться отрезком Х (см. рис. 1.20), который равен:
Рис. 1.20. Схема центрального КШМ
Из треугольников А 1 АВ и ОА 1 А следует, что
Учитывая, что , получаем:
Из прямоугольных треугольников А 1 АВ и А 1 ОА устанавливаем, что
Откуда
то, подставив полученные выражения в формулу для перемещения поршня, получим:
Так как то
Полученное уравнение характеризует движение деталей КШМ в зависимости от угла поворота коленчатого вала и показывает, что путь поршня можно условно представить состоящим из двух гармонических перемещений:
где – путь поршня первого порядка, который имел бы место при наличии шатуна бесконечной длины;
– путь поршня второго порядка, т. е. дополнительное перемещение, зависящее от конечной длины шатуна.
На рис. 1.21 даны кривые пути поршня по углу поворота коленчатого вала. Из рисунка видно, что при повороте коленчатого вала на угол, равный 90°, поршень проходит больше половины своего хода.
Рис. 1.21. Изменение пути поршня в зависимости от угла поворота коленчатого вала
Скорость
где –угловая скорость вращения вала.
Скорость поршня можно представить в виде суммы двух слагаемых:
где – гармонически изменяющаяся скорость поршня первого порядка, т. е. скорость, с которой двигался бы поршень при наличии шатуна бесконечно большой длины;
– гармонически изменяющаяся скорость поршня второго порядка, т. е. скорость дополнительного перемещения, возникающая вследствие наличия шатуна конечной длины.
На рис. 1.22 даны кривые скорости поршня по углу поворота коленчатого вала. Значения углов поворота коленчатого вала, где поршень достигает максимальных значений скорости, зависят от? и ее увеличением смещаются в стороны мертвых точек.
Для практических оценок параметров двигателя используется понятие средней скорости поршня :
Для современных автомобильных двигателей Vср = 8–15 м/с, для тракторных – Vср = 5–9 м/с.
Ускорение поршня определяется как первая производная пути поршня по времени:
Рис. 1.22. Изменение скорости поршня в зависимости от угла поворота коленчатого вала
Ускорение поршня можно представить в виде суммы двух слагаемых:
где – гармонически изменяющееся ускорение поршня первого порядка;
– гармонически изменяющееся ускорение поршня второго порядка.
На рис. 1.23 даны кривые ускорения поршня по углу поворота коленчатого вала. Анализ показывает, что максимальное значение ускорения имеет место при нахождении поршня в ВМТ. При положении поршня в НМТ величина ускорения достигает минимального (наибольшего отрицательного) противоположного по знаку значения и абсолютная величина его зависит от?.
Рис 1.23. Изменение ускорения поршня в зависимости от угла поворота коленчатого вала







Стоит ли переходить в негосударственный пенсионный фонд Пенсия переход в негосударственный пенсионный фонд
Счет 98 в 1с 8.3. Доходы будущих периодов: порядок учета и отражения в отчетности. Пример. Учет доходов будущих периодов в связи с договором аренды
Рынки ценных бумаг гипотезы об эффективности рынка Современная трактовка эффективности рынка
Презентация на тему роль государства в экономике
Экономические издержки безработицы Экономические издержки безработицы