Curs 4. CINEMATICA SI DINAMICA MOTOARELOR CU ARDERE INTERNA PISTON 1. Cinematica si dinamica mecanismului manivelei 2. Echilibrarea motorului Mecanismul manivela (CCM) este cea mai comuna implementare structurala a unui element functional important al motorului termic al convertorului final. Elementul sensibil al acestui convertor este pistonul 2 (vezi fig. 1), al cărui fund detectează presiunea gazului. Mișcarea alternativă și liniară a pistonului (sub influența presiunii gazului) este transformată în mișcare de rotație a arborelui cotit de ieșire folosind biela 4 și manivela 5.
Părțile mobile ale arborelui cotit includ și volantul montat la capătul din spate al arborelui cotit. Energia mecanică a unui arbore cotit rotativ este caracterizată de cuplul și viteza de rotație n Părțile staționare ale arborelui cotit includ blocul cilindric 3, chiulasa 1 și panoul 6. Fig. 1. Schema unui motor cu ardere internă cu piston: 1 cap bloc; 2 pistoane; 3 bloc cilindri; 4 biela; 5 manivelă arbore cotit; b sump (bada de ulei)

Condițiile de funcționare ale pieselor arborelui cotit ale motoarelor moderne, asociate cu influența forțelor gazului asupra pistonului, sunt caracterizate de viteze și accelerații semnificative și rapid variabile. Biela și arborele cotit percep și transmit sarcini semnificative. Analiza tuturor forțelor care acționează în arborele cotit al motorului este necesară pentru calcularea rezistenței elementelor motorului, determinarea sarcinilor pe rulmenți, evaluarea echilibrului motorului și calcularea suporturilor motorului. Mărimea și natura modificării sarcinilor mecanice care cad asupra acestor părți sunt determinate pe baza studiilor cinematice și dinamice ale arborelui cotit. Calculul dinamic este precedat de un calcul termic, care face posibilă selectarea dimensiunilor principale ale motorului (diametrul cilindrului, cursa pistonului) și determinarea mărimii și naturii modificării forțelor sub influența presiunii gazului.

Abv Fig. 2. Scheme de proiectare de bază ale mecanismelor de manivelă ale motoarelor de automobile: o centrală; b deplasat; c în formă de V 1. Cinematica și dinamica mecanismului manivelei La motoarele cu piston de automobile se folosesc în principal arbori cotiți cu trei scheme de proiectare (fig. 2): a) axa cilindrului central, sau axial, se intersectează cu axa arborelui cotit; b) decalat sau disaxial, axa cilindrului este deplasată cu o anumită distanță față de axa arborelui cotit; c) cu o biela trasă, două sau mai multe biele sunt așezate pe un pivot al arborelui cotit.

Cel mai răspândit în motoarele de automobile este arborele cotit central. Să analizăm cinematica și dinamica funcționării sale. Sarcina analizei cinematice a arborelui cotit este de a stabili legile de mișcare ale pistonului și bielei cu legea cunoscută de mișcare a manivelei arborelui cotit. La derivarea legilor de bază, se neglijează rotația neuniformă a arborelui cotit, presupunând că viteza sa unghiulară este constantă. Poziția pistonului corespunzătoare PMS este luată ca poziție inițială. Toate mărimile care caracterizează cinematica mecanismului sunt exprimate în funcție de unghiul de rotație al arborelui cotit. Calea pistonului. Din diagramă (vezi Fig. 2, a) rezultă că mișcarea pistonului din PMS, corespunzătoare rotației arborelui cotit printr-un unghi φ, este egală cu Sn = OA1 -OA = R(l - cos φ) + Lsh (I - cosβ) (1 ) unde R este raza arborelui cotit, m; L w este lungimea bielei, m Din trigonometrie se știe că cosβ = (l - sin2 φ) 2, iar din Fig. 2 și rezultă că (2)

Notă Expresia este un binom Newton, care poate fi extins într-o serie, putem scrie Pentru motoarele de automobile λ = 0,24...0,31. (3) Neglijând termenii seriei de mai sus de ordinul doi, acceptăm cu suficientă acuratețe pentru practică Înlocuind valoarea obținută a cosβ în expresia (1) și ținând cont că obținem expresia finală care descrie mișcarea pistonului

(4) Viteza pistonului. Formula pentru determinarea vitezei pistonului v n se obține prin diferențierea expresiei (4) în funcție de timp, (5) unde este viteza unghiulară a arborelui cotit. Pentru evaluare comparativă Proiectele motoarelor introduc conceptul de turație medie a pistonului (m/s): unde n este viteza de rotație a arborelui cotit, rpm. Pentru motoarele de automobile moderne, valoarea vp.sr fluctuează în m/s. Cu cât viteza medie a pistonului este mai mare, cu atât suprafețele de ghidare ale cilindrului și pistonului se uzează mai repede.

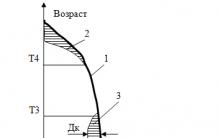
Accelerația pistonului. Expresia pentru accelerația pistonului j p se obține prin diferențierea expresiei (5) în raport cu timpul (6) În Fig. În figura 2 sunt prezentate curbele de modificări ale traseului, vitezei și accelerației pistonului în funcție de unghiul de rotație al arborelui cotit φ, construite după formulele (4)...(6) pentru o rotație completă a arborelui cotit. Analiza curbelor ne permite să remarcăm următoarele: la rotirea manivelei din poziția inițială cu primul sfert de tură (de la φ = 0 la φ = 90°), pistonul parcurge o distanță mai mare Rλ decât la rotirea celui de-al doilea sfert de tură. , ceea ce determină o viteză medie mai mare a pistonului în primele sferturi și o uzură mare la partea superioară a cilindrului; viteza pistonului nu este constantă: este zero la punctele moarte și are valoarea maxima la φ aproape de 75° și 275°; accelerația pistonului atinge cele mai mari valori absolute la TDC și BDC, adică. în acele momente în care direcția de mișcare a pistonului se schimbă: în acest caz, accelerația la PMS este mai mare decât la BDC; la v nmax = 0 (accelerația își schimbă semnul).


Sarcina analizei dinamice a arborelui cotit este de a obține formule de calcul pentru determinarea mărimii și naturii modificării forțelor care acționează asupra pistonului, bielei și arborelui cotit și momentele de forță care apar în arborele cotit în timpul funcționării motorului. Cunoașterea forțelor care acționează asupra pieselor arborelui cotit este necesară pentru calcularea rezistenței elementelor motorului și determinarea sarcinilor pe rulmenți. Când motorul funcționează, piesele arborelui cotit sunt supuse forțelor de la presiunea gazului în cilindru și forța de inerție a maselor în mișcare ale mecanismului, precum și forța de frecare și forța de rezistență utilă pe arborele motorului. Forța de presiune a gazului P g care acționează asupra pistonului de-a lungul axei cilindrului este calculată prin formula (7) unde Pi este presiunea gazului indicator (presiunea deasupra pistonului) la un unghi dat de manivelă, MPa; p 0 presiune în carterul motorului (sub piston), MPa; O zonă a fundului pistonului, m2.

Curbele dependenței forței de presiune RG de unghiul de rotație a manivelei φ sunt prezentate în Fig. 3. Când construiți un grafic, luați în considerare că forța este pozitivă dacă este îndreptată spre arborele cotit și negativă dacă este îndreptată departe de arbore. Orez. 3. Modificarea forțelor de presiune a gazului, a inerției și a forței totale în funcție de unghiul de rotație al arborelui cotit

Forțele de inerție, în funcție de natura mișcării părților mobile ale CVM, sunt împărțite în forțe de inerție ale maselor în mișcare alternative P j și forțe de inerție ale maselor rotative R a. Masa m w a bielei, care participă simultan la mișcări alternative și de rotație, este înlocuită cu două mase m 1 și m 2, concentrate în centrele A și B ale capetelor pistonului și, respectiv, manivelei (Fig. 4, b). Pentru calcule aproximative, luați t x = 0,275 t w și t 2 = 0,725 t w. Forța inerțială a maselor în mișcare alternativă (piston cu inele și bolț m p, precum și masa m w, biela) acționează de-a lungul axei cilindrului și este egală cu (8) Natura modificării acestei forțe este similară cu natura modificarea accelerației pistonului j n. Semnul minus arată că direcțiile forței și ale accelerației sunt diferite. În Fig. 3. Forța inerțială a maselor rotative, care este o forță centrifugă, este îndreptată de-a lungul razei manivelei față de axa sa de rotație și este egală cu (9)

Unde mk este masa dezechilibrată a manivelei, care se consideră concentrată pe axa manivelei în punctul B (Fig. 4, b); m w.w. - masa jurnalului de biela cu părți adiacente și concentrate ale obrajilor; m este masa părții mijlocii a obrazului închisă în contur a-b-c-d-a, al cărui centru de greutate este situat la o distanță p de axa de rotație a arborelui (Fig. 4, a). Orez. 4. Un sistem de mase concentrate, echivalent dinamic cu mecanismul manivelei: o schemă de aducere a maselor manivelei; b schema prezentată a mecanismului manivelei

Puterea totală. Forța de presiune a gazului P g și forța de inerție a maselor în mișcare alternativă P j acționează împreună de-a lungul axei cilindrului. Pentru a studia dinamica arborelui cotit este importantă suma acestor forțe (P = P t + P j). Forța P pentru diferite unghiuri de rotație ale manivelei se obține prin adunarea algebrică a ordonatelor punctelor curbelor P t și P j (vezi fig. 3). Pentru a studia efectul forței totale P asupra piesei arborelui cotit, o vom descompune în două componente ale forței: P w, îndreptată de-a lungul axei bielei și N, care acționează perpendicular pe axa cilindrului (Fig. 5). , a): Să transferăm forța P w de-a lungul liniei de acțiune a știftului de manivelă central (punctul B) și să o înlocuim cu două forțe componente, tangențială (7) și radială (K): (10) (11)


La centrul O al manivelei aplicăm două forțe reciproc opuse T" și T", egale și paralele cu forța T. Forțele T și T" formează o pereche cu un umăr egal cu raza R a manivelei. Momentul a acestei perechi de forțe care rotesc manivela se numește cuplul motorului MD = TR Să transferăm forța radială în centrul O și să găsim forțele Psh rezultate K și T" (Fig. 5, b). Forța P w este egală și paralelă cu forța P w. Descompunerea forței Psh în direcțiile de-a lungul axei cilindrului și perpendicular pe aceasta dă două componente ale forței P" și N". Forța P" este egală ca mărime cu forța P, care este compusă din forțele P t și P,. Prima dintre cele două forțe însumate este echilibrată de forța presiunii gazului asupra chiulasei, a doua este transmisă către susține motorul. Această forță inerțială dezechilibrată a pieselor mobile alternative P j este reprezentată de obicei sub forma sumei a două forțe (12) care se numesc forțe de inerție de ordinul întâi (PjI) și al doilea (PjII). Aceste forțe acționează de-a lungul axei cilindrului.

Forțele N" și N (Fig. 5, c) constituie o pereche de forțe cu un moment M def = -NH, având tendința de a răsturna motorul. Momentul de răsturnare, numit și cuplul reactiv al motorului, este întotdeauna egal cu cuplul motorului, dar are direcția opusă Acest moment prin suporturile externe ale motorului este transmis cadrului mașinii Utilizând formula (10), precum și dependența M D =TR, este posibil să se grafice cuplul indicator M d. a unui motor monocilindric în funcție de unghiul φ (Fig. 6, a situat deasupra axei absciselor reprezintă pozitiv, iar cele situate sub axa absciselor lucru negativ al cuplului Împărțirea sumei algebrice a acestor zone A). lungimea graficului l, obținem valoarea medie a momentului unde M este scara momentului.

Pentru a aprecia gradul de uniformitate al cuplului motor indicat, introducem coeficientul de denivelare a cuplului unde M max ; M min; M avg, respectiv maxim, minim și mediu indicator momente. Pe măsură ce numărul de cilindri ai motorului crește, coeficientul μ scade, adică. uniformitatea cuplului crește (Fig. 6). Denivelarea cuplului determină modificări ale vitezei unghiulare a arborelui cotit, care se apreciază prin coeficientul de denivelare: unde: ω max ; ω min ; ω av, respectiv vitezele unghiulare cele mai mari, cele mai mici și medii ale arborelui cotit pe ciclu,


Denivelarea dată a cursei δ se asigură prin folosirea unui volant cu moment de inerție J, folosind relațiile: unde A este aria situată deasupra liniei M av (Fig. 6, b) și este proporțională cu surplusul de lucru W. a cuplului; - scara unghiului de rotație a arborelui cotit, 1 rad/mm i ab - (i număr de cilindri, segment ab în mm); n viteza de rotatie, rpm Excesul de lucru este determinat grafic, valorile lui δ și J sunt specificate în timpul proiectării. Pentru motoarele de automobile δ = 0,01...0,02.

2. Echilibrarea motorului Motorul este considerat echilibrat dacă, în condiții de funcționare în regim de echilibru, forțele și momentele care acționează asupra suporturilor sale sunt constante ca mărime și direcție sau egale cu zero. Într-un motor dezechilibrat, forțele variabile în mărime și direcție transmise suspensiei provoacă vibrații în cadrul și corpul submotor. Aceste vibrații cauzează adesea daune suplimentare componentelor vehiculului. În rezolvarea practică a problemelor de echilibrare a motoarelor, se iau în considerare de regulă următoarele forțe și momente care acționează asupra suporturilor motorului cu piston: a) forțele inerțiale ale maselor în mișcare alternativă ale CVM de ordinul I P jI și al doilea P jII; b) forța centrifugă de inerție a maselor dezechilibrate rotative ale KShM R c; c) momentele longitudinale M jI și M jII ale forțelor de inerție P jI și P jII; d) momentul centrifug longitudinal M c forța centrifugă de inerție R c.

Condițiile de echilibrare a motorului sunt descrise de următorul sistem de ecuații: (13) Echilibrarea se realizează în două moduri, utilizate separat sau simultan: 1. prin alegerea unui proiect de arbore cotit astfel încât forțele și momentele specificate care apar în diferiți cilindri să fie reciproc. echilibrat; 2. utilizarea contragreutăților, i.e. mase suplimentare, a căror forță de inerție este egală ca mărime și opusă ca direcție forțelor echilibrate. Să luăm în considerare echilibrarea unui motor cu un singur cilindru în care forțele de inerție P jI, P jII, P c sunt dezechilibrate. Forțele inerțiale ale primului ordin P jI și al doilea P jII pot fi complet echilibrate folosind un sistem de contragreutăți suplimentare.

Forța P jI =m j Rω 2 cos φ se echilibrează prin instalarea a două contragreutăți cu masa t pr 1 pe doi arbori suplimentari paraleli cu axa arborelui cotit și situate simetric față de axa cilindrului, rotindu-se în direcții opuse cu viteza unghiulară. a arborelui cotit ω. Contragreutățile sunt instalate astfel încât în orice moment direcția suspensiei lor să facă un unghi cu verticala egal cu unghiul de rotație al arborelui cotit φ (Fig. 7). În timpul rotației, fiecare contragreutate creează o forță centrifugă unde p j este distanța de la axa de rotație a contragreutății până la centrul său de greutate. Prin descompunerea vectorilor a două forțe în componente orizontale Y I și verticale X I, suntem convinși că pentru orice φ forțele Y I sunt echilibrate reciproc, iar forțele X I dau o rezultantă Forța R) poate echilibra complet forța P l dacă condiția este întâlnit

Acolo unde forța P și este echilibrată în același mod, numai contragreutățile în acest caz se rotesc cu viteza unghiulară dublă 2ω (Fig. 7). Forța centrifugă de inerție Р c poate fi complet echilibrată cu ajutorul contragreutăților, care sunt instalate pe obrajii arborelui cotit pe partea opusă manivelei. Masa fiecărei contragreutăți t pr este selectată în conformitate cu condiția în care p este distanța de la centrul de greutate al contragreutății la axa de rotație.


Diagrama forțelor de inerție care acționează într-un motor cu un singur rând cu 4 cilindri este prezentată în Fig. 8. Din aceasta reiese clar că pentru o formă dată a arborelui cotit, forțele inerțiale de ordinul întâi sunt echilibrate Σ РjI = 0. În planul longitudinal al motorului, forțele formează două perechi, momentul P jI din care M jI = P jI а. Deoarece direcțiile acestor momente sunt opuse, ele sunt de asemenea echilibrate (Σ M jI = 0). Orez. 8. Diagrama forțelor de inerție care acționează într-un motor cu un singur rând cu 4 cilindri

Forțele centrifuge și momentele și momentele lor de forțe de inerție de ordinul doi sunt de asemenea echilibrate, ceea ce înseamnă că la un motor cu 4 cilindri forțele P jII rămân dezechilibrate. Ele pot fi echilibrate folosind contragreutăți rotative, așa cum sa menționat mai sus, dar acest lucru va complica designul motorului. La un motor cu 6 cilindri în linie în patru timpi, manivelele arborelui cotit sunt distanțate uniform la 120°. În acest motor, atât forțele inerțiale, cât și momentele lor sunt complet echilibrate. Un motor cu un singur rând în 8 cilindri în patru timpi poate fi considerat ca două motoare cu 4 cilindri cu un singur rând, cu arborii cotit rotți la 90° unul față de celălalt. Într-un astfel de design de motor, toate forțele inerțiale și momentele lor sunt, de asemenea, echilibrate. În Fig. 9.

În fiecare secțiune cu 2 cilindri, forțele de inerție rezultante de ordinul întâi și forțele de inerție rezultante ale maselor rotative ale cilindrului stâng și drept sunt constante ca mărime și sunt direcționate de-a lungul razei manivelei. Forțele de inerție de ordinul doi rezultate în secțiune sunt variabile ca mărime și acționează în plan orizontal. În fig. 9 forțe P jI, P jII, P c - forțele rezultante de inerție pentru fiecare secțiune de cilindri gemeni, cursele din denumirea forțelor din figură indică numărul secțiunii cilindrului. Pentru întregul motor (pentru trei perechi de cilindri) suma forțelor de inerție este zero, adică momentele totale ale forțelor de inerție de ordinul întâi și, respectiv, forțelor centrifuge sunt egale și acționează într-un plan de rotație care trece prin axa arborele cotit și făcând un unghi de 30 cu planul primei manivele °. Pentru a echilibra aceste momente, pe cele două obraji exterioare ale arborelui cotit sunt instalate contragreutăți (vezi Fig. 9). Masa de contragreutate tpr se determină din condiție

Unde b este distanța dintre centrele de greutate ale contragreutăților. Momentul total al forțelor de inerție de ordinul doi acționează în plan orizontal. De obicei, ΣM jII nu este echilibrat, deoarece acest lucru este asociat cu o complicație semnificativă a designului. Pentru a apropia echilibrul real de echilibrul teoretic în producția de motoare, sunt prevăzute o serie de măsuri de proiectare și tehnologia: - arborele cotit este realizat cât mai rigid; - piesele mobile cu piston în timpul asamblarii sunt selectate ca un set complet cu cea mai mică diferență în masele seturilor în diferiți cilindri ai aceluiași motor; - abaterile admisibile asupra dimensiunilor pieselor arborelui cotit sunt setate cât mai mici; - piesele rotative sunt echilibrate cu grija, iar arborii cotit si volantele sunt echilibrate dinamic.


Echilibrarea constă în identificarea dezechilibrului arborelui față de axa de rotație și autoechilibrarea prin îndepărtarea metalului sau prin atașarea greutăților de echilibrare. Echilibrarea pieselor rotative este împărțită în statică și dinamică. Un corp este considerat echilibrat static dacă centrul de masă al corpului se află pe axa de rotație. Piesele rotative în formă de disc al căror diametru este mai mare decât grosimea lor sunt supuse echilibrării statice. Piesa este montată pe un arbore cilindric, care este așezat pe două prisme orizontale paralele. Piesa se autoinstalează rotind partea grea în jos. Acest dezechilibru este eliminat prin atașarea unei contragreutate într-un punct diametral opus părții inferioare (grele) a piesei. În practică, pentru echilibrarea statică, se folosesc instrumente care permit determinarea imediată a masei greutății de echilibrare și a locului de instalare a acesteia. Echilibrarea dinamică este asigurată dacă este îndeplinită condiția de echilibrare statică și este îndeplinită a doua condiție: suma momentelor forțelor centrifuge ale maselor rotative față de orice punct de pe axa arborelui trebuie să fie egală cu zero. Când sunt îndeplinite aceste două condiții, axa de rotație coincide cu una dintre principalele axe de inerție ale corpului.

Echilibrarea dinamică se realizează prin rotirea arborelui pe mașini speciale de echilibrare. GOST stabilește clase de precizie de echilibrare pentru rotoarele rigide, precum și cerințele și metodele de echilibrare pentru calcularea dezechilibrelor. De exemplu, ansamblul arborelui cotit al unui motor pentru un autoturism și camion este estimată a fi clasa a 6-a de precizie, dezechilibrul ar trebui să fie în mm · rad/s. În timpul funcționării motorului, fiecare manivelă a arborelui cotit este supusă unor forțe tangenţiale și normale în schimbare continuă și periodică, provocând deformații variabile de torsiune și încovoiere în sistemul elastic al ansamblului arborelui cotit. Vibrațiile unghiulare relative ale maselor concentrate pe arbore, care provoacă răsucirea secțiunilor individuale ale arborelui, sunt numite vibrații de torsiune. La conditii cunoscute tensiunile alternante cauzate de vibratiile de torsiune si incovoiere pot duce la defectarea prin oboseala a arborelui. Calculele și studiile experimentale arată că vibrațiile de încovoiere sunt mai puțin periculoase pentru arbori cotit decât vibrațiile de torsiune.

Prin urmare, ca primă aproximare, vibrațiile de încovoiere pot fi neglijate în calcule. Vibrațiile de torsiune ale arborelui cotit sunt periculoase nu numai pentru piesele arborelui cotit, ci și pentru antrenările diferitelor unități de motor și pentru unitățile de transmisie a puterii vehiculelor. De obicei, calculul pentru vibrațiile de torsiune se reduce la determinarea tensiunilor din arborele cotit la rezonanță, adică. când frecvența forței de excitare coincide cu una dintre frecvențele naturale ale arborelui. Dacă este necesar să se reducă tensiunile care apar, atunci pe arborele cotit sunt instalate amortizoare de vibrații de torsiune (amortizoare). La motoarele de automobile și de tractor, cele mai comune amortizoare sunt frecarea internă (cauciuc) și lichidă. Ele funcționează pe principiul absorbției energiei de vibrație și apoi disipând-o sub formă de căldură. Amortizorul de cauciuc constă dintr-o masă inerțială vulcanizată printr-o garnitură de cauciuc pe disc. Discul este legat rigid la arborele cotit. În modurile rezonante, masa inerțială începe să oscileze, deformând garnitura de cauciuc. Deformarea acestuia din urmă contribuie la absorbția energiei de vibrație și „frustrează” vibrațiile rezonante ale arborelui cotit.

În amortizoarele de frecare cu fluide, masa inerțială liberă este plasată în interiorul unei carcase închise ermetic, conectată rigid la arborele cotit. Spațiul dintre pereții carcasei și masă este umplut cu un lichid siliconic special de vâscozitate ridicată. Când este încălzit, vâscozitatea acestui lichid se modifică ușor. Amortizoarele de vibrații de torsiune trebuie instalate în locația arborelui unde amplitudinea vibrației este cea mai mare.

Cinematica mecanismului manivelei
Motoarele auto cu ardere internă folosesc în principal două tipuri de mecanisme de manivelă (manivela): central(axial) și deplasat(diaxial) (Fig. 5.1). Un mecanism de compensare poate fi creat dacă axa cilindrului nu intersectează axa arborelui cotit al motorului cu ardere internă sau este decalată în raport cu axa tijului pistonului. Un motor cu combustie internă cu mai mulți cilindri este format pe baza schemelor specificate de motor CV sub forma unui design liniar (în linie) sau cu mai multe rânduri.
Orez. 5.1. Diagrame cinematice ale arborelui cotit al unui motor autotractor: O- liniar central; b- liniar deplasat
Legile de mișcare ale pieselor arborelui cotit sunt studiate folosind structura sa, parametrii geometrici de bază ai legăturilor sale, fără a ține cont de forțele care provoacă mișcarea acestuia și de forțele de frecare, precum și în absența unor goluri între elementele în mișcare asociate și o constantă. viteza unghiulara a manivelei.
Principalii parametri geometrici care determină legile de mișcare a elementelor arborelui cotit central sunt (Fig. 5.2, a): g- raza manivelei arborelui cotit; / w - lungimea bielei. Parametrul A = g/1 w este un criteriu pentru asemănarea cinematică a mecanismului central. Motoarele auto cu ardere internă folosesc mecanisme cu A = 0,24...0,31. În arborii cotit diaxiale (Fig. 5.2, b) cantitatea de deplasare a axei cilindrului (știft) față de axa arborelui cotit (O)îi afectează cinematica. Pentru motoarele cu ardere internă auto, deplasarea relativă La = a/g= 0,02...0,1 - criteriu suplimentar de similitudine cinematică.

Orez. 5.2. Diagrama de calcul a KShM: O- centrală; b- deplasat
Cinematica elementelor arborelui cotit este descrisă atunci când pistonul se mișcă, începând de la PMS la BDC, iar manivela se rotește în sensul acelor de ceasornic după legile variației timpului (/) ale următorilor parametri:
- ? mișcarea pistonului - x;
- ? unghiul manivelei - (p;
- ? unghiul de abatere al bielei față de axa cilindrului - (3.
Analiza cinematicii arborelui cotit se efectuează la constanţă viteza unghiulara a arborelui cotit c sau viteza de rotatie a arborelui cotit ("), legata intre ele prin relatia co = kp/ 30.
Când motorul cu ardere internă funcționează, elementele mobile ale arborelui cotit fac următoarele mișcări:
- ? mișcarea de rotație a manivelei arborelui cotit față de axa sa este determinată de dependențele unghiului de rotație ср, viteza unghiulară с și accelerația e în timp t.În acest caz, cp = co/, iar dacă co este constant - e = 0;
- ? mișcarea alternativă a pistonului este descrisă de dependențele deplasării sale x, vitezei v și accelerației j din unghiul manivelei avg.
Mișcarea pistonului central Arborele cotit la rotirea manivelei printr-un unghi cp se determină ca suma deplasărilor sale din rotirea manivelei printr-un unghi cp (Xj) și din deformarea bielei printr-un unghi p (x p) (vezi Fig. 5.2) :
Această dependență, folosind relația X = g/1 w, relația dintre unghiurile ср și р (Asincp = sinp) poate fi reprezentată aproximativ ca o sumă de armonici care sunt multipli ai vitezei de rotație a arborelui cotit. De exemplu, pentru X= 0,3 primele amplitudini ale armonicilor sunt legate ca 100:4.5:0.1:0.005. Apoi, cu suficientă precizie pentru practică, descrierea mișcării pistonului poate fi limitată la primele două armonice. Atunci pentru cp = co/
Viteza pistonului definit ca  si aproximativ
si aproximativ
Accelerația pistonului calculate prin formula  si aproximativ
si aproximativ
La motoarele moderne cu ardere internă v max = 10...28 m/s, y max = 5000...20.000 m/s 2. Pe măsură ce viteza pistonului crește, pierderile prin frecare și uzura motorului cresc.
Pentru un arbore cotit deplasat, dependențele aproximative au forma

Aceste dependențe, în comparație cu analogii lor pentru arborele cotit central, diferă într-un termen suplimentar proporțional cu kk. Deoarece pentru motoarele moderne valoarea sa este kk= 0,01...0,05, atunci influența sa asupra cinematicii mecanismului este mică și în practică este de obicei neglijată.
Cinematica mișcării complexe plan-paralele a bielei în planul balansării sale constă în mișcarea capului său superior cu parametrii cinematici ai pistonului și mișcarea de rotație față de punctul de articulare a bielei cu pistonul .
Când se studiază cinematica unui arbore cotit, se presupune că arborele cotit al motorului se rotește cu o viteză unghiulară constantă ω , nu există goluri în părțile de împerechere, iar mecanismul este considerat cu un grad de libertate.
În realitate, din cauza neuniformității cuplului motor, viteza unghiulară este variabilă. Prin urmare, atunci când se iau în considerare probleme speciale de dinamică, în special vibrațiile de torsiune ale sistemului arborelui cotit, este necesar să se țină cont de modificarea vitezei unghiulare.
Variabila independentă este unghiul de rotație al arborelui cotit φ. În timpul analizei cinematice, sunt stabilite legile de mișcare ale legăturilor arborelui cotit și, în primul rând, a pistonului și a bielei.
Poziția inițială a pistonului în punctul mort superior (punctul B 1) (Fig. 1.20), iar sensul de rotație al arborelui cotit este în sensul acelor de ceasornic. În același timp, pentru a identifica legile mișcării și dependențele analitice, se stabilesc punctele cele mai caracteristice. Pentru un mecanism central, astfel de puncte sunt axa bolțului pistonului (punctul ÎN), care, împreună cu pistonul, efectuează o mișcare alternativă de-a lungul axei cilindrului și a axei tijei bielei manivelei (punctul O), care se rotește în jurul axei arborelui cotit DESPRE.
Pentru a determina dependențele cinematicii arborelui cotit, introducem următoarea notație:
l– lungimea bielei;
r– raza manivelei;
λ – raportul dintre raza manivelei și lungimea bielei.
Pentru motoarele moderne de automobile și tractor, valoarea este λ = 0,25–0,31. Pentru motoarele de mare viteză, pentru a reduce forțele de inerție ale maselor în mișcare alternative, se folosesc biele mai lungi decât la motoarele de turație mică.
β – unghiul dintre axele bielei și cilindrul, a cărui valoare este determinată de următoarea relație:
Cele mai mari unghiuri β pentru motoarele moderne de automobile și tractor sunt 12-18°.
Mutare (cale) pistonul va depinde de unghiul de rotație al arborelui cotit și este determinat de segment X(vezi Fig. 1.20), care este egal cu:
Orez. 1.20. Schema KShM centrală
Din triunghiuri A 1 ABŞi OA 1 A rezultă că
Având în vedere că , obținem:
Din triunghiuri dreptunghiulare A 1 ABŞi A 1 OA stabilim ca
Unde
apoi, înlocuind expresiile rezultate în formula de mișcare a pistonului, obținem:
De atunci
Ecuația rezultată caracterizează mișcarea pieselor arborelui cotit în funcție de unghiul de rotație al arborelui cotit și arată că traseul pistonului poate fi reprezentat în mod convențional ca fiind format din două mișcări armonice:
unde este calea pistonului de ordinul întâi care ar avea loc dacă ar exista o biela de lungime infinită;
– calea pistonului de ordinul doi, adică mișcare suplimentară în funcție de lungimea finală a bielei.
În fig. Figura 1.21 prezintă traseul curbat al pistonului de-a lungul unghiului de rotație al arborelui cotit. Figura arată că atunci când arborele cotit este rotit cu un unghi de 90°, pistonul se deplasează mai mult de jumătate din cursa sa.
Orez. 1.21. Schimbarea traiectoriei pistonului în funcție de unghiul arborelui cotit
Viteză
unde este viteza unghiulară de rotație a arborelui.
Viteza pistonului poate fi reprezentată ca suma a doi termeni:
unde este viteza care variază armonic a pistonului de ordinul întâi, adică viteza cu care s-ar mișca pistonul dacă ar exista o biela de lungime infinit de lungă;
– turația variabilă armonică a pistonului de ordinul doi, adică viteza mișcării suplimentare care rezultă din prezența unei biele de lungime finită.
În fig. Figura 1.22 prezintă curbele vitezei pistonului bazate pe unghiul de rotație al arborelui cotit. Valorile unghiurilor de rotație ale arborelui cotit, unde pistonul atinge valorile maxime ale vitezei, depind de? iar creșterea ei se deplasează către punctele moarte.
Pentru evaluările practice ale parametrilor motorului, se utilizează conceptul viteza medie a pistonului:
Pentru motoare auto moderne Vav= 8–15 m/s, pentru tractoare – Vav= 5–9 m/s.
Accelerare pistonul este definit ca prima derivată a traiectoriei pistonului în raport cu timpul:
Orez. 1.22. Modificarea vitezei pistonului în funcție de unghiul arborelui cotit
Accelerația pistonului poate fi reprezentată ca suma a doi termeni:
unde este accelerația care variază armonic a pistonului de ordinul întâi;
– accelerația variabilă armonic a pistonului de ordinul doi.
În fig. Figura 1.23 prezintă curbele de accelerație a pistonului bazate pe unghiul de rotație al arborelui cotit. Analiza arată că accelerația maximă are loc atunci când pistonul este la PMS. Când pistonul este poziționat la BDC, valoarea accelerației atinge o valoare minimă (cea mai negativă) opusă în semn și valoarea sa absolută depinde de?.
Figura 1.23. Modificarea accelerației pistonului în funcție de unghiul arborelui cotit









Efectuarea unui inventar
Ulyukaev, Navka și Patrushev
Rambursarea impozitului pe venit pentru tratament: procedura de inregistrare si calculul sumei deducerii
Înlocuirea importurilor - ce este?
perioada minima de asigurare OSAGO