سخنرانی 4. سینماتیک و دینامیک موتورهای احتراق داخلی پیستونی 1. سینماتیک و دینامیک مکانیسم میل لنگ 2. تعادل موتور مکانیزم میل لنگ (CCM) رایج ترین اجرای ساختاری یک عنصر عملکردی مهم موتور حرارتی مبدل نهایی است. عنصر حساس این مبدل پیستون 2 است (شکل 1 را ببینید) که پایین آن فشار گاز را حس می کند. حرکت رفت و برگشتی و خطی پیستون (تحت تاثیر فشار گاز) با استفاده از شاتون 4 و میل لنگ 5 به حرکت چرخشی میل لنگ خروجی تبدیل می شود.
قطعات متحرک میل لنگ همچنین شامل چرخ فلایو است که در انتهای عقب میل لنگ نصب شده است. انرژی مکانیکی یک میل لنگ دوار با گشتاور و سرعت چرخش n مشخص می شود. 1. نمودار یک موتور احتراق داخلی پیستونی: 1 سر بلوک. 2 پیستون؛ بلوک 3 سیلندر؛ 4 شاتون؛ 5 میل لنگ میل لنگ; ب سامپ (مخزن نفت)

شرایط عملیاتی قطعات میل لنگ موتورهای مدرن، همراه با تأثیر نیروهای گاز بر روی پیستون، با سرعت ها و شتاب های قابل توجه و به سرعت متغیر مشخص می شود. شاتون و میل لنگ بارهای قابل توجهی را درک و انتقال می دهند. تجزیه و تحلیل تمام نیروهای وارد شده در میل لنگ موتور برای محاسبه عناصر موتور برای استحکام، تعیین بار روی یاتاقان ها، ارزیابی تعادل موتور و محاسبه تکیه گاه موتور ضروری است. مقدار و ماهیت تغییر بارهای مکانیکی وارد بر این قطعات بر اساس مطالعات سینماتیکی و دینامیکی میل لنگ تعیین می شود. محاسبات دینامیکی قبل از یک محاسبه حرارتی انجام می شود که امکان انتخاب ابعاد اصلی موتور (قطر سیلندر، ضربه پیستون) و تعیین مقدار و ماهیت تغییر نیروها تحت تأثیر فشار گاز را فراهم می کند.

Abv Fig. 2. نمودارهای طراحی اساسی مکانیسم های میل لنگ موتورهای خودرو: مرکزی. ب جابجا شده ج V شکل 1. سینماتیک و دینامیک مکانیسم لنگ در موتورهای پیستونی خودرو، میل لنگ از سه طرح طراحی عمدتاً استفاده می شود (شکل 2): الف) محور سیلندر مرکزی یا محوری با محور میل لنگ قطع می شود. ب) محور سیلندر با فاصله ای نسبت به محور میل لنگ جابجا می شود. ج) با یک شاتون دنباله دار، دو یا چند میله اتصال بر روی یک میل لنگ میل لنگ قرار می گیرند.

رایج ترین در موتورهای خودرو میل لنگ مرکزی است. بیایید سینماتیک و دینامیک عملکرد آن را تجزیه و تحلیل کنیم. وظیفه تحلیل سینماتیکی میل لنگ این است که قوانین حرکت پیستون و شاتون را با قانون شناخته شده حرکت میل لنگ تعیین کند. هنگام استخراج قوانین اساسی، چرخش ناهموار میل لنگ با فرض ثابت بودن سرعت زاویه ای آن نادیده گرفته می شود. موقعیت پیستون مربوط به TDC به عنوان موقعیت اولیه در نظر گرفته می شود. تمام مقادیر مشخص کننده سینماتیک مکانیسم به عنوان تابعی از زاویه چرخش میل لنگ بیان می شود. مسیر پیستونی از نمودار (نگاه کنید به شکل 2، a) چنین است که حرکت پیستون از TDC، مربوط به چرخش میل لنگ از طریق زاویه φ، برابر با Sn = OA1 -OA = R(l - cos φ) است. + Lsh (I - cosβ) (1) که در آن R شعاع میل لنگ، m است. L w طول شاتون است، m از مثلثات مشخص شده است که cosβ = (l - sin2 φ) 2، و از شکل. 2، و نتیجه می شود که (2)

توجه داشته باشید که عبارت یک دوجمله ای نیوتنی است که می تواند به یک سری گسترش یابد، می توانیم برای موتورهای خودرو λ = 0.24...0.31 بنویسیم. (3) با صرف نظر از شرایط سری بالاتر از مرتبه دوم، ما با دقت کافی برای تمرین می پذیریم که مقدار cosβ به دست آمده را با عبارت (1) جایگزین کنیم و با در نظر گرفتن این که عبارت نهایی را که حرکت پیستون را توصیف می کند به دست می آوریم.

(4) سرعت پیستون. فرمول تعیین سرعت پیستون v n با تمایز عبارت (4) با توجه به زمان، (5) که در آن سرعت زاویه ای میل لنگ است به دست می آید. برای ارزیابی مقایسه ایطراحی موتور مفهوم سرعت متوسط پیستون (m/s) را معرفی می کند: که در آن n سرعت چرخش میل لنگ، دور در دقیقه است. برای موتورهای مدرن خودرو، ارزش vp.sr در m/s در نوسان است. هرچه میانگین سرعت پیستون بیشتر باشد، سیلندر و سطوح راهنمای پیستون سریعتر فرسوده می شوند.

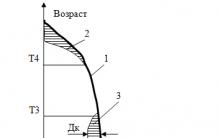
شتاب پیستون. بیان شتاب پیستون j p با تمایز عبارت (5) نسبت به زمان (6) در شکل 1 به دست می آید. شکل 2 منحنی تغییرات در مسیر، سرعت و شتاب پیستون را بسته به زاویه چرخش میل لنگ φ نشان می دهد که طبق فرمول (4)...(6) برای یک چرخش کامل میل لنگ ساخته شده است. تجزیه و تحلیل منحنیها به ما اجازه میدهد تا به موارد زیر توجه کنیم: هنگام چرخاندن میل لنگ از موقعیت اولیه در یک چهارم دور اول (از φ = 0 تا φ = 90 درجه)، پیستون فاصله Rλ بیشتری را نسبت به چرخش ربع دوم دور میکند. که باعث افزایش میانگین سرعت پیستون در ربع های اول و سایش زیاد بالای سیلندر می شود. سرعت پیستون ثابت نیست: در نقاط مرده صفر است و دارد حداکثر مقداردر φ نزدیک به 75 درجه و 275 درجه؛ شتاب پیستون در TDC و BDC به بیشترین مقدار مطلق خود می رسد، یعنی. در آن لحظاتی که جهت حرکت پیستون تغییر می کند: در این حالت، شتاب در TDC بیشتر از BDC است. در v nmax = 0 (شتاب علامت خود را تغییر می دهد).


وظیفه تجزیه و تحلیل دینامیکی میل لنگ به دست آوردن فرمول های محاسباتی برای تعیین مقدار و ماهیت تغییر در نیروهای وارد بر پیستون، شاتون و میل لنگ و گشتاورهای نیرویی است که در میل لنگ در حین کار موتور ایجاد می شود. آگاهی از نیروهای وارد بر قطعات میل لنگ برای محاسبه عناصر موتور برای استحکام و تعیین بار بر یاتاقان ها ضروری است. هنگامی که موتور در حال کار است، قطعات میل لنگ در معرض نیروهای ناشی از فشار گاز در سیلندر و نیروی اینرسی توده های متحرک مکانیسم و همچنین نیروی اصطکاک و نیروی مقاومت مفید بر روی محور موتور قرار می گیرند. نیروی فشار گاز Pg که بر روی پیستون در امتداد محور سیلندر وارد می شود با فرمول (7) محاسبه می شود که در آن Pi فشار گاز نشانگر (فشار بالای پیستون) در یک زاویه میل لنگ معین، MPa است. فشار p 0 در میل لنگ موتور (زیر پیستون)، MPa؛ n مساحت کف پیستون، m2.

منحنی های وابستگی نیروی فشار RG به زاویه چرخش میل لنگ φ در شکل نشان داده شده است. 3. هنگام ساخت نمودار، در نظر بگیرید که نیرو اگر به سمت میل لنگ هدایت شود مثبت است و اگر از محور دور شود منفی است. برنج. 3. تغییر در نیروهای فشار گاز، اینرسی و نیروی کل بسته به زاویه چرخش میل لنگ

نیروهای اینرسی، بسته به ماهیت حرکت قطعات متحرک CVM، به نیروهای اینرسی توده های متحرک رفت و برگشتی P j و نیروهای اینرسی جرم های دوار R a تقسیم می شوند. جرم m w شاتون، که به طور همزمان در حرکات رفت و برگشتی و چرخشی شرکت می کند، با دو جرم m 1 و m 2 که به ترتیب در مراکز A و B سر پیستون و میل لنگ متمرکز شده اند، جایگزین می شود (شکل 4، b). برای محاسبات تقریبی، t x = 0.275 t w و t 2 = 0.725 t w را در نظر بگیرید. نیروی اینرسی توده های متحرک رفت و برگشتی (پیستون با حلقه ها و پین m p و همچنین جرم m w، شاتون) در امتداد محور سیلندر عمل می کند و برابر است با (8) ماهیت تغییر این نیرو شبیه به ماهیت تغییر در شتاب پیستون j n. علامت منفی نشان می دهد که جهت نیرو و شتاب متفاوت است. نموداری از وابستگی Pj به زاویه چرخش میل لنگ cp در شکل نشان داده شده است. 3. نیروی اینرسی توده های دوار که یک نیروی گریز از مرکز است در امتداد شعاع میل لنگ از محور چرخش آن هدایت می شود و برابر با (9) است.

در جایی که mk جرم نامتعادل میل لنگ است که روی محور میل لنگ در نقطه B متمرکز شده است (شکل 4، b). m w.w - جرم مجله میله اتصال با قسمت های مجاور و متمرکز گونه ها. m جرم قسمت میانی گونه است که در آن محصور شده است کانتور a-b-c-d-a، که مرکز ثقل آن در فاصله p از محور چرخش شفت قرار دارد (شکل 4، a). برنج. 4. سیستمی از توده های متمرکز، به صورت دینامیکی معادل مکانیسم میل لنگ: طرحی برای آوردن جرم های میل لنگ. b نمودار مکانیسم میل لنگ نشان داده شده است

قدرت کل نیروی فشار گاز Pg و نیروی اینرسی توده های متحرک رفت و برگشتی P j در امتداد محور سیلندر با هم عمل می کنند. برای مطالعه دینامیک میل لنگ، مجموع این نیروها مهم است (P = P t + P j). نیروی P برای زوایای مختلف چرخش میل لنگ با جمع جبری مختصات نقاط منحنی Pt و Pj به دست می آید (شکل 3 را ببینید). برای مطالعه تأثیر نیروی کل P بر روی قسمت میل لنگ، آن را به دو جزء نیرو تجزیه می کنیم: P w که در امتداد محور شاتون هدایت می شود و N که عمود بر محور سیلندر عمل می کند (شکل 5). ، a): اجازه دهید نیروی Pw را در امتداد خط عمل آن به میل لنگ مرکزی (نقطه B) منتقل کنیم و آن را با دو نیروی مماس (7) و شعاعی (K) جایگزین کنیم: (10) (11)


به مرکز O میل لنگ دو نیروی متضاد T" و T"، مساوی و موازی با نیروی T اعمال می کنیم. نیروهای T و T" یک جفت با شانه ای برابر با شعاع R میل لنگ تشکیل می دهند. از این جفت نیروهایی که میل لنگ را میچرخانند، گشتاور موتور را MD = TR میگویند. نیروی P w برابر و موازی با نیروی P w است. تجزیه نیروی Psh در جهات در امتداد محور سیلندر و عمود بر آن دو جزء نیروی P" و N" را به دست می دهد. نیروی P" برابر است با نیروی P که از نیروهای P t و P تشکیل شده است. اولی از دو نیروی جمع شده با نیروی فشار گاز روی سرسیلندر متعادل می شود و نیروی دوم به سرسیلندر منتقل می شود. این نیروی اینرسی نامتعادل قطعات متحرک Pj معمولاً به صورت مجموع دو نیرو (12) نمایش داده می شود که به آنها نیروهای اینرسی مرتبه اول (PjI) و دوم (PjII) می گویند. این نیروها در امتداد محور سیلندر عمل می کنند.

نیروهای N" و N (شکل 5، ج) یک جفت نیرو با یک گشتاور M def = -NH تشکیل می دهند که تمایل به واژگونی موتور دارند. گشتاور واژگونی که گشتاور راکتیو موتور نیز نامیده می شود، همیشه برابر است با گشتاور موتور، اما دارای جهت مخالف است، این گشتاور از طریق تکیه گاه های موتور به قاب خودرو منتقل می شود و همچنین با استفاده از وابستگی M D =TR، می توان گشتاور نشانگر را ترسیم کرد. یک موتور تک سیلندر بسته به زاویه φ (شکل 6، a واقع در بالای محور ابسیسا، نشان دهنده مثبت بودن محور آبسیا است که مجموع جبری این مناطق A را تقسیم می کند طول نمودار l، مقدار متوسط لحظه را به دست می آوریم که در آن M مقیاس لحظه است.

برای ارزیابی درجه یکنواختی گشتاور موتور مشخص شده، ضریب ناهمواری گشتاور را معرفی می کنیم که در آن M max ; M دقیقه میانگین M به ترتیب حداکثر، حداقل و میانگین گشتاورهای نشانگر. با افزایش تعداد سیلندرهای موتور، ضریب μ کاهش می یابد، یعنی. یکنواختی گشتاور افزایش می یابد (شکل 6). ناهمواری گشتاور باعث تغییراتی در سرعت زاویه ای میل لنگ می شود که با ضریب ناهمواری ارزیابی می شود: جایی که: ω max ; ω min ; ω av به ترتیب بیشترین، کمترین و متوسط سرعت زاویه ای میل لنگ در هر چرخه،


ناهمواری داده شده stroke δ با استفاده از یک چرخ طیار با ممان اینرسی J، با استفاده از روابط تضمین می شود: که در آن A منطقه ای است که بالای خط M av قرار دارد (شکل 6، b) و متناسب با کار اضافی W است. از گشتاور؛ - مقیاس زاویه چرخش میل لنگ، 1 راد / میلی متر i ab - (تعداد سیلندرها، قطعه ab به میلی متر)؛ n سرعت چرخش، دور در دقیقه کار اضافی به صورت گرافیکی تعیین می شود. برای موتورهای خودرو δ = 0.01 ... 0.02.

2. متعادل کردن موتور اگر در شرایط کارکرد پایدار، نیروها و گشتاورهای وارد بر تکیه گاه آن از نظر بزرگی و جهت ثابت یا برابر با صفر باشند، موتور متعادل در نظر گرفته می شود. در یک موتور نامتعادل، نیروهای متغیر در بزرگی و جهتی که به سیستم تعلیق منتقل می شود باعث ایجاد ارتعاش در قاب و بدنه موتور فرعی می شود. این ارتعاشات اغلب باعث آسیب بیشتر به اجزای خودرو می شود. در حل عملی مسائل بالانس موتور، نیروها و گشتاورهای زیر که بر روی تکیه گاه های موتور پیستونی اثر می کنند معمولاً در نظر گرفته می شود: الف) نیروهای اینرسی توده های متحرک رفت و برگشتی CVM مرتبه اول PjI و دوم PjII. ب) نیروی گریز از مرکز اینرسی توده های نامتعادل دوار KShM Rc. ج) گشتاورهای طولی MjI و MjII نیروهای اینرسی PjI و PjII. د) گشتاور گریز از مرکز طولی Mc نیروی گریز از مرکز از اینرسی Rc.

شرایط تعادل موتور توسط سیستم معادلات زیر شرح داده می شود: (13) بالانس به دو روش انجام می شود که به طور جداگانه یا همزمان استفاده می شود: 1. با انتخاب طرح میل لنگ به گونه ای که نیروها و گشتاورهای مشخص شده در سیلندرهای مختلف متقابلاً متقابل باشند. متعادل؛ 2. استفاده از وزنه های تعادل، یعنی. جرم های اضافی که نیروی اینرسی آن ها از نظر بزرگی برابر و در جهت مخالف نیروهای متعادل است. اجازه دهید تعادل یک موتور تک سیلندر را در نظر بگیریم که در آن نیروهای اینرسی PjI، PjII، Pc نامتعادل هستند. نیروهای اینرسی اولین مرتبه PjI و دوم PjII را می توان با استفاده از سیستم وزنه های تعادل اضافی کاملاً متعادل کرد.

نیروی P jI = m j Rω 2 cos φ با نصب دو وزنه تعادل با جرم t pr 1 روی دو میل اضافی موازی با محور میل لنگ و به طور متقارن نسبت به محور سیلندر که در جهت مخالف با سرعت زاویه ای می چرخند متعادل می شود. از میل لنگ ω. وزنه های تعادل طوری نصب می شوند که در هر لحظه جهت تعلیق آنها زاویه ای با عمودی برابر با زاویه چرخش میل لنگ φ ایجاد کند (شکل 7). در طول چرخش، هر وزنه تعادل نیروی گریز از مرکز ایجاد می کند که در آن p j فاصله محور چرخش وزنه تعادل تا مرکز ثقل آن است. با تجزیه بردارهای دو نیرو به مؤلفههای افقی Y I و عمودی XI، متقاعد میشویم که برای هر φ، نیروهای Y I متقابلاً متعادل هستند، و نیروهای X I یک نیروی حاصله R را میدهند) میتوانند نیروی Pl را کاملاً متعادل کنند، اگر شرط باشد. ملاقات کرد

در جایی که نیروی P و به همین ترتیب متعادل می شود، فقط وزنه های تعادل در این حالت با سرعت زاویه ای دوبرابر 2ω می چرخند (شکل 7). نیروی گریز از مرکز اینرسی Р c را می توان با کمک وزنه های تعادلی که روی گونه های میل لنگ در سمت مقابل میل لنگ نصب می شوند، کاملاً متعادل کرد. جرم هر وزنه تعادل t pr مطابق با شرطی انتخاب می شود که p فاصله مرکز ثقل وزنه تعادل تا محور چرخش باشد.


نمودار نیروهای اینرسی وارد شده در یک موتور 4 سیلندر تک ردیفه در شکل 1 نشان داده شده است. 8. از آن مشخص است که برای یک شکل معین از میل لنگ، نیروهای اینرسی مرتبه اول متعادل هستند Σ РjI = 0. در صفحه طولی موتور، نیروها دو جفت را تشکیل می دهند که لحظه P jI آن M است. jI = P jI а. از آنجایی که جهت این گشتاورها مخالف هستند، آنها نیز متعادل هستند (Σ M jI = 0). برنج. 8. نمودار نیروهای اینرسی وارده در موتور 4 سیلندر تک ردیفه

نیروهای گریز از مرکز و گشتاورها و گشتاورهای نیروهای اینرسی مرتبه دوم آنها نیز متعادل هستند، به این معنی که در یک موتور 4 سیلندر نیروهای P jII نامتعادل می مانند. همانطور که در بالا ذکر شد، می توان آنها را با استفاده از وزنه های چرخان متعادل کرد، اما این امر طراحی موتور را پیچیده می کند. در یک موتور 6 سیلندر خطی چهار زمانه، میل لنگ میل لنگ به طور مساوی در 120 درجه قرار می گیرد. در این موتور هم نیروهای اینرسی و هم گشتاورهای آنها کاملاً متعادل است. یک موتور 8 سیلندر چهار زمانه تک ردیفه را می توان به عنوان دو موتور 4 سیلندر تک ردیفی در نظر گرفت که میل لنگ آنها 90 درجه نسبت به یکدیگر می چرخند. در چنین طراحی موتوری، تمام نیروهای اینرسی و گشتاورهای آنها نیز متعادل هستند. نمودار یک موتور چهار زمانه 6 سیلندر V شکل با زاویه بین ردیف های 90 درجه (زاویه کمبر سیلندر) و سه میل لنگ جفت شده در زاویه 120 درجه در شکل نشان داده شده است. 9.

در هر بخش 2 سیلندر، نیروهای اینرسی حاصل از مرتبه اول و نیروهای اینرسی حاصل از توده های دوار استوانه چپ و راست از نظر بزرگی ثابت هستند و در امتداد شعاع میل لنگ هدایت می شوند. نیروهای اینرسی مرتبه دوم حاصل در مقطع، از نظر بزرگی متغیر بوده و در صفحه افقی عمل می کنند. در شکل 9 نیرو PjI، PjII، Pc - نیروهای اینرسی حاصل برای هر بخش از سیلندرهای دوقلو، ضربات در تعیین نیروها در شکل نشان دهنده تعداد بخش سیلندر است. برای کل موتور (برای سه جفت سیلندر) مجموع نیروهای اینرسی صفر است، یعنی کل گشتاورهای نیروهای اینرسی مرتبه اول و نیروهای گریز از مرکز به ترتیب برابر هستند و در یک صفحه دوار که از محور می گذرد عمل می کنند. میل لنگ و ایجاد زاویه 30 با صفحه اولین میل لنگ درجه. برای متعادل کردن این لحظات، وزنه های تعادل بر روی دو گونه خارجی میل لنگ نصب می شود (شکل 9 را ببینید). جرم وزنه تعادل tpr از شرایط تعیین می شود

جایی که b فاصله بین مراکز ثقل وزنه های تعادل است. گشتاور کل نیروهای اینرسی مرتبه دوم در صفحه افقی عمل می کند. معمولا ΣM jII متعادل نیست، زیرا این امر با پیچیدگی قابل توجهی در طراحی همراه است. برای نزدیک کردن تعادل واقعی به تعادل نظری در تولید موتور، تعدادی از اقدامات طراحی و تکنولوژیکی ارائه شده است: - میل لنگ تا حد ممکن سفت و محکم ساخته شده است. - قطعات متحرک رفت و برگشتی در هنگام مونتاژ به عنوان یک مجموعه کامل با کمترین اختلاف در جرم مجموعه ها در سیلندرهای مختلف یک موتور انتخاب می شوند. - انحرافات مجاز در ابعاد قطعات میل لنگ تا حد امکان کوچک تنظیم شده است. - قطعات دوار با دقت بالانس می شوند و میل لنگ و فلایویل ها به صورت پویا متعادل می شوند.


تعادل عبارت است از شناسایی عدم تعادل شفت نسبت به محور چرخش و متعادل کردن خود با حذف فلز یا با چسباندن وزنه های متعادل. تعادل قطعات دوار به دو دسته استاتیک و دینامیک تقسیم می شود. اگر مرکز جرم بدن روی محور چرخش قرار گیرد، جسمی از نظر استاتیک متعادل در نظر گرفته می شود. قطعات دیسکی شکل دوار که قطر آنها بیشتر از ضخامت آنها است در معرض تعادل ایستا قرار می گیرند. این قطعه بر روی یک محور استوانهای نصب میشود که روی دو منشور افقی موازی قرار میگیرد. این قطعه با چرخاندن قسمت سنگین خود به سمت پایین نصب می شود. این عدم تعادل با چسباندن یک وزنه تعادل در نقطه ای که به صورت قطری مخالف قسمت پایینی (سنگین) قطعه است، از بین می رود. در عمل، برای تعادل استاتیک، از ابزارهایی استفاده می شود که به فرد اجازه می دهد بلافاصله جرم وزن متعادل کننده و محل نصب آن را تعیین کند. تعادل دینامیکی در صورتی تضمین می شود که شرط تعادل ایستا برقرار باشد و شرط دوم برآورده شود: مجموع گشتاورهای نیروهای گریز از مرکز جرم های دوار نسبت به هر نقطه از محور شفت باید برابر با صفر باشد. هنگامی که این دو شرط برآورده می شود، محور چرخش با یکی از محورهای اصلی اینرسی بدنه منطبق می شود.

بالانس دینامیکی با چرخش شفت بر روی ماشین های بالانس مخصوص انجام می شود. GOST کلاس های دقت تعادل را برای روتورهای صلب و همچنین الزامات تعادل و روش هایی برای محاسبه عدم تعادل ایجاد می کند. به عنوان مثال، مجموعه میل لنگ یک موتور برای یک خودروی سواری و کامیونتخمین زده می شود که کلاس دقت 6 باشد، عدم تعادل باید در محدوده mm · rad/s باشد. در حین کارکرد موتور، هر میل لنگ میل لنگ تحت تأثیر نیروهای مماسی و نرمال به طور مداوم و متناوب تغییر می کند که باعث تغییر شکل های پیچشی و خمشی متغیر در سیستم الاستیک مجموعه میل لنگ می شود. ارتعاشات زاویه ای نسبی توده های متمرکز روی شفت که باعث پیچش بخش های جداگانه شفت می شود، ارتعاشات پیچشی نامیده می شود. در شرایط شناخته شدهتنش های متناوب ناشی از ارتعاشات پیچشی و خمشی می تواند منجر به شکست خستگی شفت شود. محاسبات و مطالعات تجربی نشان می دهد که ارتعاشات خمشی برای میل لنگ خطر کمتری نسبت به ارتعاشات پیچشی دارد.

بنابراین، به عنوان اولین تقریب، ارتعاشات خمشی را می توان در محاسبات نادیده گرفت. ارتعاشات پیچشی میل لنگ نه تنها برای قطعات میل لنگ، بلکه برای درایوهای واحدهای مختلف موتور و برای واحدهای انتقال قدرت خودرو نیز خطرناک است. به طور معمول، محاسبه ارتعاشات پیچشی به تعیین تنش های میل لنگ در رزونانس می رسد، یعنی. زمانی که فرکانس نیروی مهیج با یکی از فرکانس های طبیعی شفت منطبق باشد. در صورت نیاز به کاهش تنش های ایجاد شده، میراگرهای ارتعاشی پیچشی (دمپر) روی میل لنگ نصب می شوند. در موتورهای خودرو و تراکتور رایج ترین دمپرها اصطکاک داخلی (لاستیکی) و مایع هستند. آنها بر اساس اصل جذب انرژی ارتعاشی و سپس دفع آن به شکل گرما کار می کنند. دمپر لاستیکی شامل یک جرم اینرسی است که از طریق یک واشر لاستیکی به دیسک ولکانیزه می شود. دیسک به طور سفت و سخت به میل لنگ متصل است. در حالت های تشدید، جرم اینرسی شروع به نوسان می کند و واشر لاستیکی را تغییر شکل می دهد. تغییر شکل دومی به جذب انرژی ارتعاشی کمک می کند و ارتعاشات تشدید کننده میل لنگ را "ناامید" می کند.

در جاذب های اصطکاک سیال، جرم اینرسی آزاد در داخل یک محفظه مهر و موم شده قرار می گیرد که به طور صلب به میل لنگ متصل است. فضای بین دیواره های محفظه و جرم با یک مایع سیلیکونی خاص با ویسکوزیته بالا پر می شود. هنگامی که گرم می شود، ویسکوزیته این مایع کمی تغییر می کند. میراگرهای ارتعاشی پیچشی باید در محلی از محور که دامنه ارتعاش بیشتر است نصب شود.

سینماتیک مکانیسم میل لنگ
موتورهای احتراق داخلی خودرو عمدتاً از دو نوع مکانیزم میل لنگ (لنگ) استفاده می کنند: مرکزی(محوری) و آواره(دی محوری) (شکل 5.1). اگر محور سیلندر محور میل لنگ موتور احتراق داخلی را قطع نکند یا نسبت به محور پین پیستون افست شود، می توان مکانیزم افست ایجاد کرد. یک موتور احتراق داخلی چند سیلندر بر اساس طرح های مشخص شده موتور CV به شکل یک طرح خطی (در خط) یا چند ردیفی تشکیل می شود.
برنج. 5.1. نمودارهای سینماتیکی میل لنگ یک موتور اتوتراکتور: الف- خطی مرکزی؛ ب- خطی جابجا شد
قوانین حرکت قطعات میل لنگ با استفاده از ساختار آن، پارامترهای هندسی اساسی پیوندهای آن، بدون در نظر گرفتن نیروهایی که باعث حرکت و نیروهای اصطکاک آن می شوند، و همچنین در صورت عدم وجود شکاف بین عناصر متحرک مرتبط و ثابت مورد مطالعه قرار می گیرد. سرعت زاویه ای میل لنگ
پارامترهای هندسی اصلی که قوانین حرکت عناصر میل لنگ مرکزی را تعیین می کنند عبارتند از (شکل 5.2، الف): g-شعاع میل لنگ; / w - طول میله اتصال. پارامتر A = گرم/1 واتمعیاری برای شباهت سینماتیکی مکانیسم مرکزی است. موتورهای احتراق داخلی خودرو از مکانیزم هایی با A = 0.24...0.31 استفاده می کنند. در میل لنگ دو محوره (شکل 5.2، ب)میزان جابجایی محور سیلندر (پین) نسبت به محور میل لنگ (الف)بر سینماتیک آن تأثیر می گذارد. برای موتورهای احتراق داخلی خودرو، جابجایی نسبی به = a/g= 0.02 ... 0.1 - معیار اضافی تشابه سینماتیکی.

برنج. 5.2. نمودار محاسبه KShM: الف- مرکزی؛ ب- آواره
سینماتیک عناصر میل لنگ هنگامی که پیستون حرکت می کند، از TDC به BDC شروع می شود، و میل لنگ با قوانین تغییرات زمانی (/) پارامترهای زیر در جهت عقربه های ساعت می چرخد، توصیف می شود:
- ? حرکت پیستون - x؛
- ? زاویه میل لنگ - (p;
- ? زاویه انحراف شاتون از محور سیلندر - (3.
تجزیه و تحلیل سینماتیک میل لنگ در انجام شده است ثباتسرعت زاویه ای میل لنگ c یا سرعت چرخش میل لنگ (") که با رابطه co = به یکدیگر مرتبط هستند. kp/ 30.
هنگامی که موتور احتراق داخلی کار می کند، عناصر متحرک میل لنگ حرکات زیر را انجام می دهند:
- ? حرکت چرخشی میل لنگ میل لنگ نسبت به محور آن با وابستگی زاویه چرخش ср، سرعت زاویه ای с و شتاب e در زمان تعیین می شود. تیدر این مورد، cp = co/، و اگر co ثابت است - e = 0.
- ? حرکت رفت و برگشتی پیستون با وابستگی های جابجایی x، سرعت v و شتاب آن توصیف می شود. jاز زاویه میل لنگ میانگین
حرکت پیستون مرکزیمیل لنگ هنگام چرخاندن میل لنگ از طریق یک زاویه cp به عنوان مجموع جابجایی های آن از چرخش میل لنگ از طریق یک زاویه cp (Xj) و از انحراف شاتون از طریق یک زاویه p (x p) تعیین می شود (شکل 5.2 را ببینید). :
این وابستگی با استفاده از رابطه X = گرم/1 وات،رابطه بین زوایای ср و р (Asincp = sinp) را می توان تقریباً به صورت مجموع هارمونیک هایی که مضربی از سرعت چرخش میل لنگ هستند نشان داد. به عنوان مثال، برای X= 0.3 اولین دامنه هارمونیک ها به صورت 100:4.5:0.1:0.005 مرتبط است. سپس با دقت کافی برای تمرین، شرح حرکت پیستون را می توان به دو هارمونیک اول محدود کرد. سپس برای cp = co/
سرعت پیستونبه عنوان تعریف شده است  و تقریبا
و تقریبا
شتاب پیستونبا فرمول محاسبه می شود  و تقریبا
و تقریبا
در موتورهای احتراق داخلی مدرن v max = 10...28 m/s، y max = 5000...20000 m/s 2. با افزایش سرعت پیستون، تلفات اصطکاک و سایش موتور افزایش می یابد.
برای یک میل لنگ جابجا شده، وابستگی های تقریبی شکل دارند

این وابستگی ها، در مقایسه با آنالوگ های خود برای میل لنگ مرکزی، در یک عبارت اضافی متناسب با kkاز آنجایی که برای موتورهای مدرن ارزش آن است kk= 0.01...0.05، سپس تأثیر آن بر سینماتیک مکانیسم کم است و در عمل معمولاً از آن غفلت می شود.
سینماتیک حرکت پیچیده صفحه موازی شاتون در صفحه تاب آن شامل حرکت سر بالایی آن با پارامترهای سینماتیکی پیستون و حرکت دورانی نسبت به نقطه اتصال شاتون با پیستون است. .
هنگام مطالعه سینماتیک یک میل لنگ، فرض می شود که میل لنگ موتور با سرعت زاویه ای ثابت ω می چرخد. , هیچ شکافی در قسمت های جفت گیری وجود ندارد و مکانیسم با یک درجه آزادی در نظر گرفته می شود.
در واقع به دلیل ناهمواری گشتاور موتور، سرعت زاویه ای متغیر است. بنابراین، هنگام در نظر گرفتن مسائل خاص دینامیک، به ویژه ارتعاشات پیچشی سیستم میل لنگ، لازم است که تغییر در سرعت زاویه ای را در نظر بگیریم.
متغیر مستقل زاویه چرخش میل لنگ φ است. در طی آنالیز سینماتیکی، قوانین حرکت پیوندهای میل لنگ، و در درجه اول پیستون و شاتون، ایجاد می شوند.
موقعیت اولیه پیستون در نقطه مرگ بالا (نقطه ب 1) (شکل 1.20) و جهت چرخش میل لنگ در جهت عقربه های ساعت است. در عین حال، برای شناسایی قوانین حرکت و وابستگی های تحلیلی، مشخص ترین نقاط تعیین می شود. برای مکانیزم مرکزی، چنین نقاطی محور پین پیستون (نقطه IN)که همراه با پیستون یک حرکت رفت و برگشتی در امتداد محور سیلندر و محور پین شاتون میل لنگ انجام می دهد (نقطه الفچرخش حول محور میل لنگ در مورد.
برای تعیین وابستگی های سینماتیک میل لنگ، نماد زیر را معرفی می کنیم:
ل- طول میله اتصال؛
r- شعاع میل لنگ؛
λ - نسبت شعاع میل لنگ به طول شاتون.
برای موتورهای مدرن خودرو و تراکتور، مقدار λ = 0.25-0.31 است. برای موتورهای پرسرعت، به منظور کاهش نیروهای اینرسی توده های متحرک رفت و برگشتی، از شاتون بلندتر نسبت به موتورهای کم سرعت استفاده می شود.
β - زاویه بین محورهای شاتون و سیلندر که مقدار آن با رابطه زیر تعیین می شود:
بزرگترین زاویه β برای موتورهای مدرن خودرو و تراکتور 12 تا 18 درجه است.
حرکت (مسیر)پیستون به زاویه چرخش میل لنگ بستگی دارد و توسط بخش تعیین می شود X(نگاه کنید به شکل 1.20)، که برابر است با:
برنج. 1.20. طرح مرکزی KShM
از مثلث ها A 1 ABو OA 1 Aبه دنبال آن است
با توجه به اینکه , دریافت می کنیم:
از مثلث های قائم الزاویه A 1 ABو A 1 OAما آن را ثابت می کنیم
کجا
سپس، با جایگزینی عبارات به دست آمده در فرمول حرکت پیستون، دریافت می کنیم:
از آن زمان
معادله حاصل حرکت قطعات میل لنگ را بسته به زاویه چرخش میل لنگ مشخص می کند و نشان می دهد که مسیر پیستون را می توان به طور معمول به صورت متشکل از دو حرکت هارمونیک نشان داد:
اگر یک شاتون با طول بی نهایت وجود داشته باشد، مسیر پیستون مرتبه اول کجاست.
- مسیر پیستون مرتبه دوم، یعنی حرکت اضافی بسته به طول نهایی شاتون.
در شکل شکل 1.21 مسیر منحنی پیستون را در امتداد زاویه چرخش میل لنگ نشان می دهد. شکل نشان می دهد که وقتی میل لنگ از طریق زاویه 90 درجه می چرخد، پیستون بیش از نیمی از حرکت خود را طی می کند.
برنج. 1.21. تغییر مسیر پیستون بسته به زاویه میل لنگ
سرعت
سرعت زاویه ای چرخش شفت کجاست.
سرعت پیستون را می توان به صورت مجموع دو جمله نشان داد:
سرعت متغییر هماهنگ پیستون مرتبه اول کجاست، یعنی سرعتی که پیستون با آن در صورت وجود شاتون با طول بی نهایت طولانی حرکت می کند.
- سرعت متغیر پیستون مرتبه دوم به طور هماهنگ، یعنی سرعت حرکت اضافی ناشی از وجود میله اتصال با طول محدود.
در شکل شکل 1.22 منحنی های سرعت پیستون را بر اساس زاویه چرخش میل لنگ نشان می دهد. مقادیر زوایای چرخش میل لنگ، جایی که پیستون به مقادیر حداکثر سرعت می رسد، بستگی دارد؟ و افزایش آن به سمت نقاط مرده تغییر می کند.
برای ارزیابی عملی پارامترهای موتور، از مفهوم استفاده می شود سرعت متوسط پیستون:
برای موتورهای مدرن خودرو واو= 8-15 متر بر ثانیه، برای تراکتورها - واو= 5-9 متر بر ثانیه.
شتابپیستون به عنوان اولین مشتق مسیر پیستون با توجه به زمان تعریف می شود:
برنج. 1.22. تغییر در سرعت پیستون بسته به زاویه میل لنگ
شتاب پیستون را می توان به صورت مجموع دو جمله نشان داد:
شتاب متغییر هماهنگ پیستون درجه اول کجاست.
- شتاب متغییر هماهنگ پیستون مرتبه دوم.
در شکل شکل 1.23 منحنی های شتاب پیستون را بر اساس زاویه چرخش میل لنگ نشان می دهد. تجزیه و تحلیل نشان می دهد که حداکثر شتاب زمانی رخ می دهد که پیستون در TDC باشد. هنگامی که پیستون در BDC قرار می گیرد، مقدار شتاب به حداقل (منفی ترین) مقدار مخالف در علامت می رسد و مقدار مطلق آن بستگی به?.
شکل 1.23. تغییر در شتاب پیستون بسته به زاویه میل لنگ









انجام موجودی
اولیوکاف، ناوکا و پاتروشف
بازپرداخت مالیات بر درآمد برای درمان: روش ثبت نام و محاسبه مبلغ کسر
جایگزینی واردات - چیست؟
حداقل دوره بیمه OSAGO